Introdução ao rastreamento de imagem planar
O rastreamento de imagem planar (Planar Image Tracking) é usado para detectar e rastrear objetos planos texturizados no cotidiano. Objetos "planos" podem ser pequenos como um livro, cartão de visita ou pôster, ou grandes como uma parede com grafite. Esses itens possuem superfície plana com texturas ricas e não repetitivas.
Este artigo resume os princípios básicos, efeitos esperados e soluções de plataforma para detecção e rastreamento de imagens planares, ajudando você a entender rapidamente os limites e pontos-chave de desenvolvimento.
Princípios básicos
Compreender esses princípios ajuda desenvolvedores a otimizar resultados e evitar problemas comuns.
Fluxo principal
Fase de carregamento e pré-processamento:
- O sistema carrega a imagem alvo, extrai pontos de características visuais e gera uma descrição de características inserida no banco de dados.
- Imagens com mais texturas são mais fáceis de identificar e rastrear. Você pode usar a ferramenta de detecção de imagens-alvo para verificar a detectabilidade antecipadamente.

Referência esquerda: textura rica (5 estrelas); direita: elementos simples, falta de textura (1 estrela).
Recomendamos imagens com qualidade 4-5 estrelas como alvo.Fase de detecção e rastreamento em tempo real:
- Após a câmera capturar cenas, o sistema analisa pontos de características e compara com o banco de dados da imagem alvo.
- Calcula a pose 3D (posição + rotação) usando o algoritmo PnP (Perspective-n-Point).
- Após detecção bem-sucedida, o sistema entra em modo de rastreamento, analisando movimento entre quadros consecutivos.
Mecanismos de otimização:
- Recuperação de perda de rastreamento: Re-detecção automática após oclusão breve ou movimento rápido.
- Rastreamento múltiplo simultâneo: Controle de concorrência via parâmetro
Simultaneous Number, permitindo um único Tracker rastrear múltiplos alvos.
Limitações técnicas
- Suporta apenas imagens planares (não objetos 3D ou conteúdo dinâmico).
- Depende de iluminação: ambientes escuros ou superexpostos dificultam detecção.
- Distância máxima: a imagem alvo deve ocupar pelo menos 30% do quadro durante detecção.
- Rastreamento múltiplo limitado pelo hardware: PC rastreia >10 alvos; dispositivos móveis 4-6 alvos.
Resultados e expectativas
Entendendo mecanismos e limitações, é crucial conhecer os efeitos alcançáveis para definir critérios de teste adequados.
Resultados ideais
- Sobreposição precisa: Alinhamento perfeito entre objetos virtuais e bordas da imagem.
- Detecção rápida: Baixíssima latência desde carregamento até detecção.
- Rastreamento estável: Mantém-se durante rotação, movimento e oclusão parcial.
Casos problemáticos e soluções
| Fenômeno | Causa | Percepção do usuário | Solução (detalhes posteriormente) |
|---|---|---|---|
| Falha na detecção | Falta de textura, tamanho reduzido | Objeto virtual não aparece | Otimizar imagem-alvo, usar ferramenta de avaliação |
| Tremedeira no rastreamento | Alvo pequeno no quadro, pontos insuficientes | Objeto virtual oscila visivelmente | Evitar distanciamento excessivo, usar modo PreferQuality |
| Perdas frequentes | Movimento rápido ou oclusão total | Piscagem/desaparecimento do objeto | Estabilizar dispositivo/alvo, aumentar tamanho do alvo |
| Falha em multi-alvos | Limitações de hardware | Alguns alvos não são rastreados | Ajustar Simultaneous Number conforme desempenho |
Métodos de validação
- Desenvolvimento: Testar via webcam no editor Unity (modo Play).
- Testes: Usar cenas Sample oficiais ou imagens próprias, variando iluminação/ângulo/distância.
Melhores práticas para imagens-alvo
O sucesso do rastreamento depende criticamente da qualidade da imagem-alvo. Siga estas diretrizes para garantir taxas de reconhecimento.
Conforme o cenário, prepare imagens-alvo fotografando objetos diretamente ou projetando padrões para impressão. Ambos podem servir como templates.
Requisitos básicos
- Formato: Preferencialmente JPG ou PNG.
- Canal alfa: Imagens com transparência são tratadas com fundo branco. Evite transparência se indesejado.
Pontos-chave de otimização
Garantir detalhes texturizados
Templates devem ter bordas definidas e variações complexas, evitando cores sólidas ou gráficos simples.

Esquerda: textura detectável; direita: imagem sólida indetectável
Evitar padrões repetitivos
Padrões regulares (xadrez, listras) reduzem unicidade dos pontos de características.
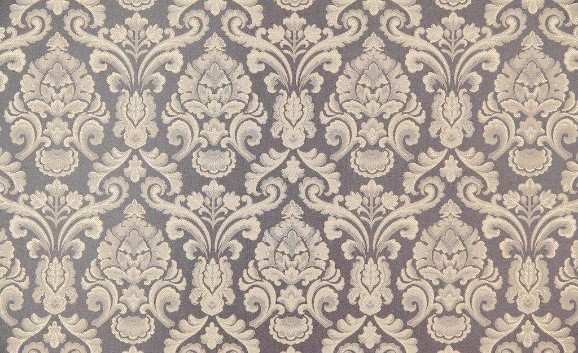
Padrão repetitivo não rastreável
Conteúdo preenchendo o quadro
O assunto principal deve ocupar a imagem maximamente, minimizando áreas vazias.
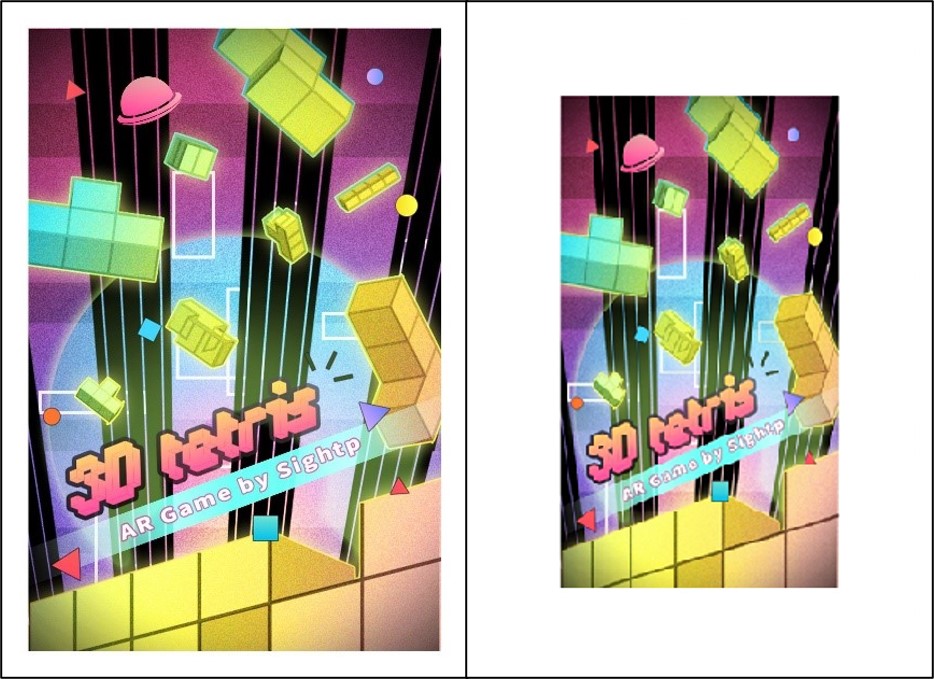
Esquerda: fácil detecção; direita: excesso de espaço branco dificulta
Controlar proporções
Evitar formatos extremamente alongados. Lado menor ≥ 20% do maior.

Imagem estreita: rastreamento difícil
Selecionar resolução adequada
Faixa recomendada: Entre SQCIF (128×96) e QVGA (1280×960).
Muito baixa: Pontos de característica insuficientes.
Muito alta: Sobrecarga desnecessária de memória e tempo de processamento ao gerar dados de Target.