AR 資料流
本文介紹了 EasyAR Sense 中的資料流。EasyAR Sense 中使用元件化 API,元件之間透過資料流來連接。
輸入輸出資料
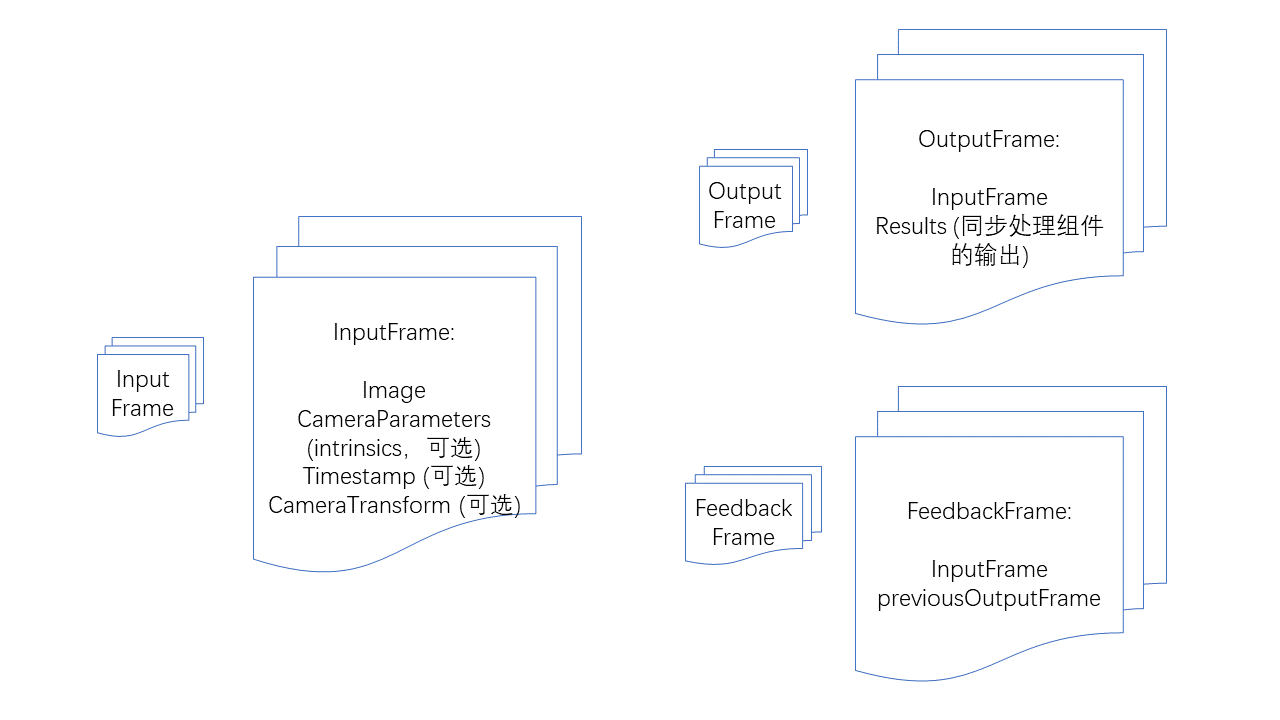
InputFrame:輸入幀。包含影像、camera 參數、時間戳、攝影機相對於世界座標系的變換和跟踪狀態。其中,camera 參數、時間戳、攝影機相對於世界座標系的變換和跟踪狀態均為可選,但特定的演算法元件會對輸入有特定的要求。
OutputFrame:輸出幀。包含輸入幀和同步處理元件的輸出結果。
FeedbackFrame:反饋幀。包含一個輸入幀和一個歷史輸出幀,用於 ImageTracker 等反饋式同步處理元件。
Camera元件
CameraDevice:Windows、Mac、iOS、Android 上的預設攝影機。
ARKitCameraDevice:iOS 上的 ARKit 預設實作。
ARCoreCameraDevice:Android 上的 ARCore 預設實作。
MotionTrackerCameraDevice:實作運動跟踪,透過多感測器融合解算裝置的 6DoF 座標。(只支援 Android )
ThreeDofCameraDevice:在預設攝影機的基礎上,增加了 3DoF 的方向。
InertialCameraDevice:在預設攝影機的基礎上,增加了 3DoF 的方向和平面的基於慣性估計的平移。
custom camera device:自訂攝影機實作。
演算法元件
反饋式同步處理元件:需要每幀跟著攝影機影像輸出結果,並且需要上一幀處理結果用於避免相互干擾。
ImageTracker:實現了平面圖像的檢測和追蹤。
ObjectTracker:實現了 3D 物體的檢測和追蹤。
同步處理組件:需要每幀跟著攝影機圖像輸出結果。
SurfaceTracker:實現了對環境表面的追蹤。
SparseSpatialMap:實現了稀疏空間地圖,提供了掃描物理空間同時生成點雲地圖並進行即時定位的能力。
MegaTracker:實現了 Mega 空間定位。
非同步處理組件:不需要每幀跟著攝影機圖像輸出結果。
CloudRecognizer:實現了雲識別。
DenseSpatialMap:實現了稠密空間地圖,可用於實現碰撞、遮擋等效果。
元件的可用性檢查
所有的元件均有 isAvailable 函式,可用於判斷該元件是否可用。
元件不可用的情況有
當前作業系統上沒有實作。
元件所需要的依賴不存在,例如 ARKit、ARCore。
元件在當前版本(variant)上不存在,例如一些精簡版本中某些功能不存在。
元件在當前 License 下不可用。
使用元件之前務必要判斷元件是否可用,並進行相應的 fallback 或者提示。
資料流
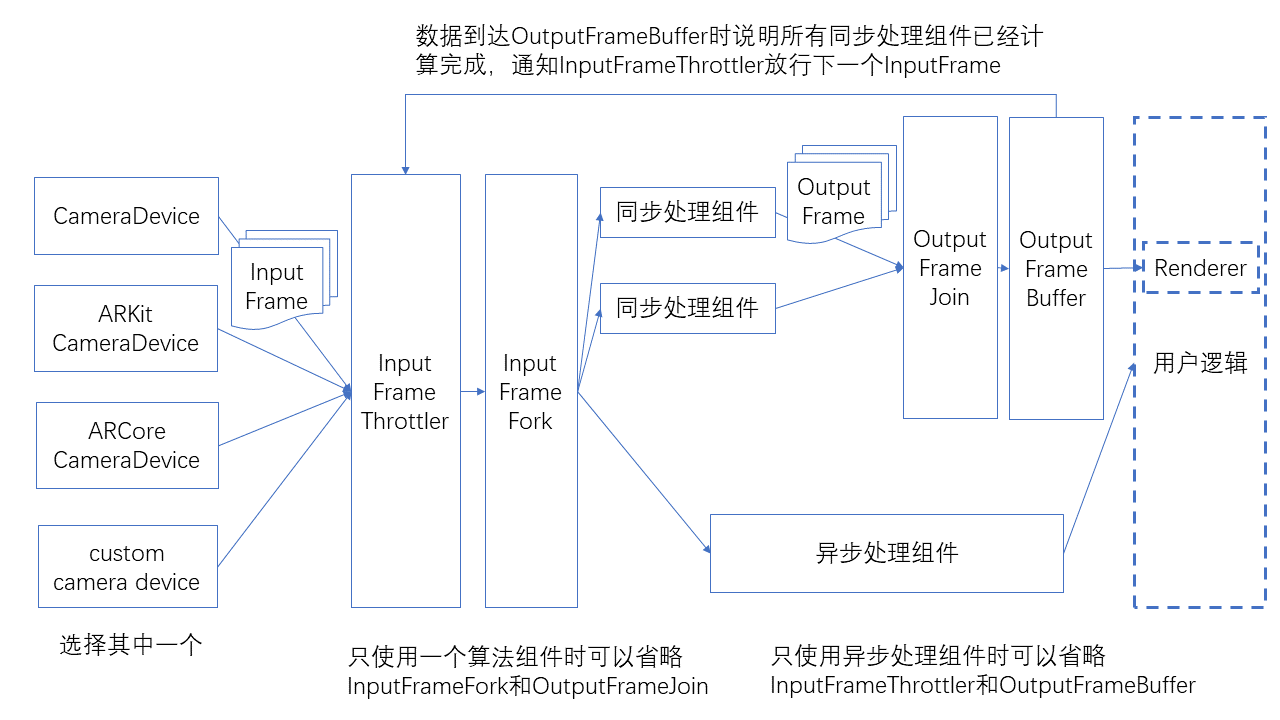
元件的連接方式如下圖所示。
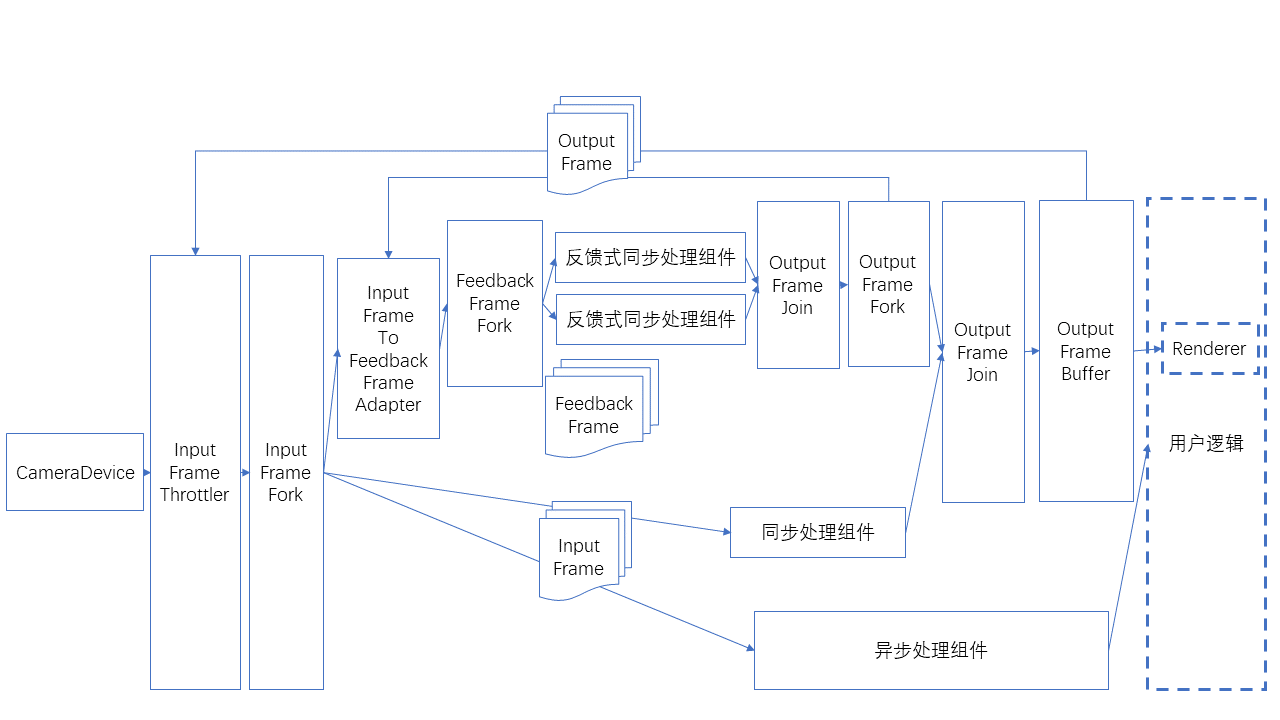
有一種特殊的輸入為反饋式幀的用法,如下圖所示。
資料流輔助類
資料流的發出和接收端口,各元件需要包含這些端口
SignalSink / SignalSource:接收/發出一個訊號(無資料)。
InputFrameSink / InputFrameSource:接收/發出一個 InputFrame。
OutputFrameSink / OutputFrameSource:接收/發出一個 OutputFrame。
FeedbackFrameSink / FeedbackFrameSource:接收/發出一個 FeedbackFrame。
資料流的分支與合併
InputFrameFork:將一個 InputFrame 分成多個並行發出。
OutputFrameFork:將一個 OutputFrame 分成多個並行發出。
OutputFrameJoin:將多個 OutputFrame 合併成一個,並將所有的結果合併到 Results 中。需要注意其多個輸入的連接不應該在有資料流入的同時進行,否則可能會陷入不能輸出的狀態。(推薦在 Camera 啟動之前完成資料流連接。)
FeedbackFrameFork:將一個 FeedbackFrame 分成多個並行發出。
資料流的限流與快取
InputFrameThrottler:接收並發出 InputFrame,但一次只發出一個,只有在接收到一個觸發訊號後才會發出下一個 InputFrame,接收到多個 InputFrame 時,後續的 InputFrame 可能會覆蓋前面的 InputFrame。
OutputFrameBuffer:接收 OutputFrame 並快取,等待使用者輪詢,接收到 OutputFrame 的時候可以發出一個訊號。
將 OutputFrameBuffer 發出的訊號接到 InputFrameThrottler 上,即可完成整個限流過程。
資料流的轉換
InputFrameToOutputFrameAdapter:可以將一個 InputFrame 直接包裝成 OutputFrame,用於渲染顯示。
InputFrameToFeedbackFrameAdapter:可以將一個 InputFrame 和一個 FeedbackFrame 包裝成 FeedbackFrame,用於回饋式同步處理元件。
InputFrame數量的限制
CameraDevice 可以設定 bufferCapacity,即發出 InputFrame 的最大數量,當前的預設值為8。
自訂攝影機可以使用 BufferPool 實作。
各元件需要的 InputFrame 數量,參考各元件的 API 文件。
如果 InputFrame 數量不足,可能造成資料流卡住,導致渲染卡住。
如果 InputFrame 數量不足,也可能出現第一次啟動渲染不卡住但切換到後台或暫停/啟動各元件後渲染卡住的情況,測試時需要注意覆蓋。
連接和斷開連接
不推薦在資料流執行過程中連接和斷開連接。
若需要在執行過程中進行連接和斷開連接,需要注意只能在割邊(去掉這條邊後資料流會一分為二)上進行,不能在環的邊(這裏的環指的是將資料流看作無向圖時邊構成的環)上、 OutputFrameJoin 的輸入或者 InputFrameThrottler 的 sideInput 上進行,否則可能會陷入資料流卡在 OutputFrameJoin 和 InputFrameThrottler 等結點無法輸出的狀態。
演算法元件均有 start/stop 功能,在 stop 的時候,幀將不會被處理,但仍然會從元件中輸出,只是不帶有結果。
典型用法
以下為單個 ImageTracker 的用法,可用於識別、跟踪不重複的平面識別圖。
![]()
以下為單個 ImageTracker 的用法,可用於識別、跟踪重複的平面識別圖。
![]()
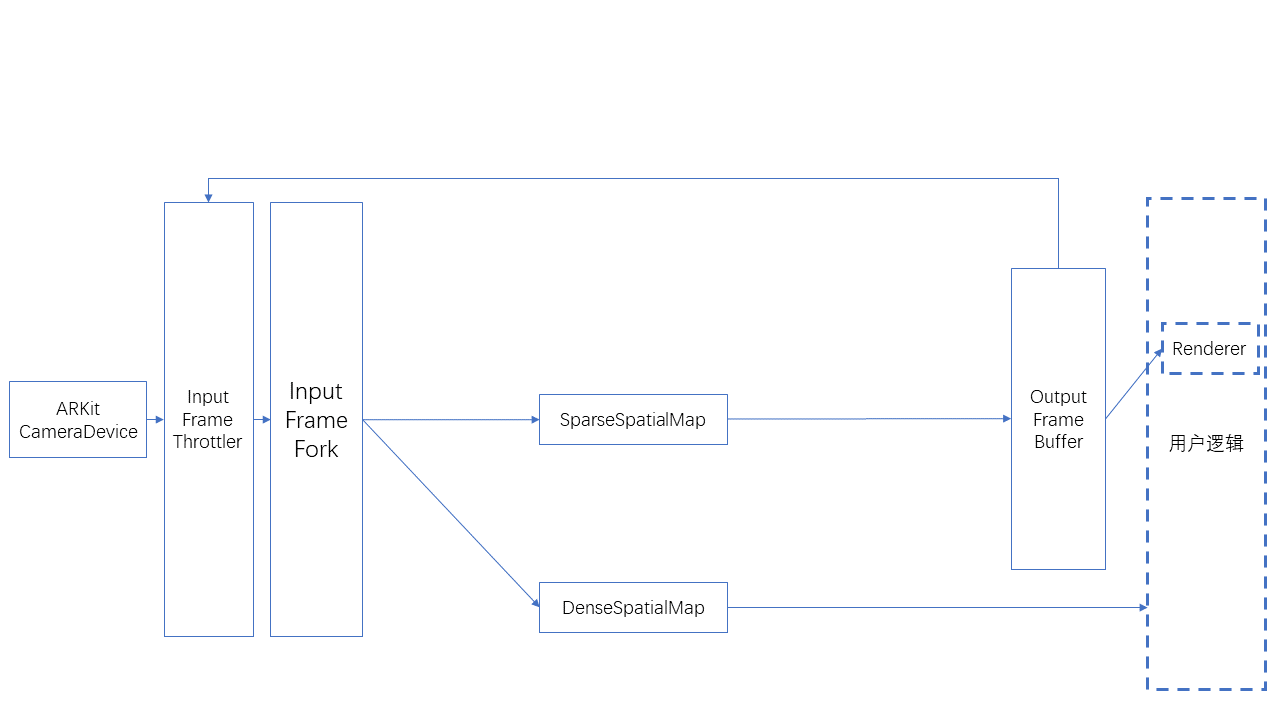
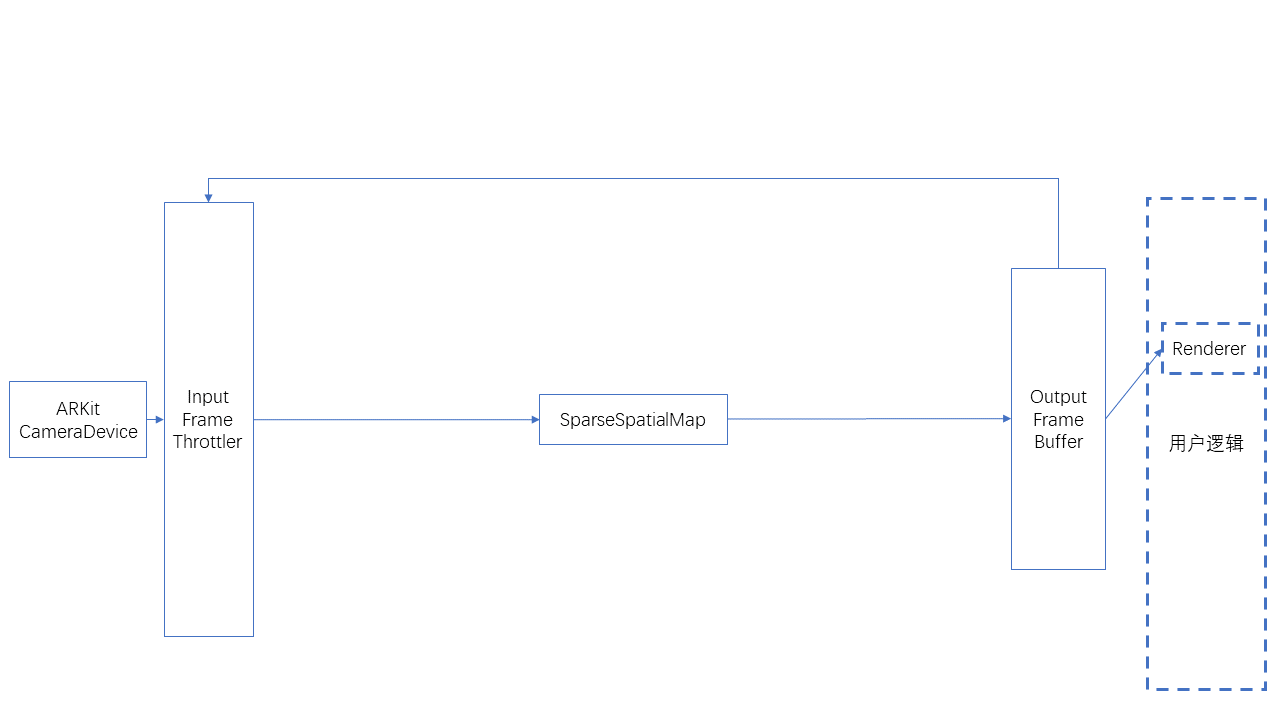
以下為 SparseSpatialMap 的用法,可用於實作稀疏空間地圖建圖和定位、跟踪。
以下為 SparseSpatialMap 和 DenseSpatialMap 同時使用的用法,可用於實作稀疏空間地圖建圖、定位、跟踪和稠密空間地圖生成。