単一画像マッピングタスクの作成
この文書では、単一画像マッピングタスクの完全な操作フローを詳細に説明します。タスク作成、データアップロード、マッピングプロセスの説明などが含まれ、ユーザーが単一画像マッピングタスクの全操作フローを規範的に完了するのに役立ちます。
単一画像タスクの作成
プロジェクト作成を完了した後、以下の手順で単一画像マッピングタスクを作成します:
管理をクリックしてマッピングタスク管理画面に入る- 右上の
全景カメラ収集タスクボタンをクリック - ポップアップダイアログでタスク情報を入力:
- タスク名:カスタムタスク名を入力
- マッピングタイプ:
単一画像マッピングを選択 - マッピングバージョンとデータ形式:最新バージョンの使用を推奨
確認して追加をクリックして作成完了

注記
- 1つのマッピングタスクはプロジェクト内の1回の完全なデータ収集に対応します
- データ収集とアップロードを外部担当者が行う場合、タスク作成後に担当者に通知し規範的なフローでデータをアップロードさせます
タスク命名規則
タスク名は簡潔明瞭で、以下の命名規則に従う必要があります:
- 各収集エリアの場所名が明確に異なる場合、直接エリア略称を使用(例:"長泰広場")
- 同名エリアが存在する場合、エリア略称の後に番号を追加して区別(例:"周荘-エリア1")
データ準備
マッピングタスクを開始する前に、収集された空間データが要求を満たしていることを確認し、規範に従って整理・保存する必要があります。以下では、データ収集デバイスおよびデータファイルの命名、保存、構造の規範を詳細に説明します。
データ収集とエクスポート
全景カメラを使用して空間データを収集します。関連デバイス設定と収集の要点については以下を参照:
データフォルダ命名
各収集エリアには、メインフォルダを準備する必要があります。命名は「省名・都市名のピンイン全称+観光地/商業区名のピンイン全称+エリア番号」とし、例:shanghaiwaitan1。
注意:フォルダ名に使用できるのは中国語、英字、数字、ハイフン(-)のみとし、その他の特殊文字は含めません。
データ保存場所
メインフォルダはローカルハードドライブ(システムドライブは非推奨)に設定し、TFカード内の収集データをメインフォルダにコピーして整理します。最終ファイルのアップロードプロセスを安定させるために、コピー前に空き容量を事前に確認することを推奨します。
データファイル構造仕様
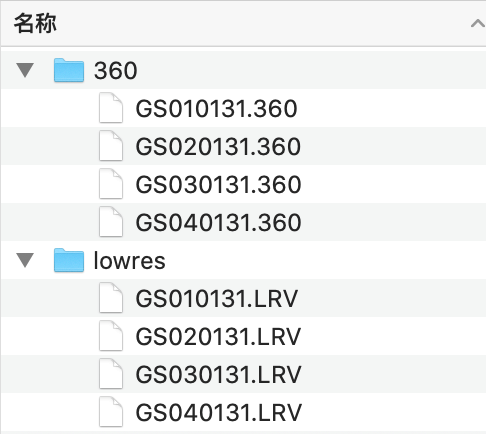
- 各エリアのメインディレクトリフォルダの下に、lowresと360の2つのサブディレクトリフォルダが必要です。
lowresフォルダ:当該エリア収集時に生成されたLRVファイルを格納します。
360フォルダ:当該エリア収集時に生成された360ファイルを格納し、ファイル名はLRVファイルと一対一対応します。 - 注意:不要なデータ(例:操作練習用に生成された動画、収集プロセス中の誤操作で生成された廃棄動画など)はアップロード不要です。
- 単一エリアのデータファイル整理後、ファイル構造は下図の通りです。
データファイル命名規則

1の命名:動画の中番号
動画の中番号:デバイスは録画中8GBごとに自動分割されるため、1エリアの収集で複数の動画が生成される可能性があります。動画の前後順序は中番号の数字が小さい順(例:1エリアで4本の動画が生成された場合、中番号は01、02、03、04)とします。2の命名:動画の末尾番号
動画の末尾番号:通常、1エリア内で生成される動画の末尾番号は全て同じです。- ファイル名形式:
GSで始まり + 01から始まる連続した中番号 + 同一の末尾番号 - 特殊状況:収集中のバッテリー交換またはメモリカード交換時、再開後に生成される動画は電源断/カード交換前の動画と中番号が連続せず、末尾番号も異なります。これらは同一エリアのデータであるため、同一メインフォルダに格納する必要があります。各エリアの撮影開始時に開始時刻を記録し、データ整理時の迅速な分類を容易にします。
- ファイル名が命名規則に合致しない場合、マッピングに予期せぬ問題が発生する可能性があり、マッピングが成功しても使用できない場合があります。
データアップロード
データアップロードをクリックし、ポップアップ内で対応するオプションを選択します。具体的なオプション説明は以下を参照:

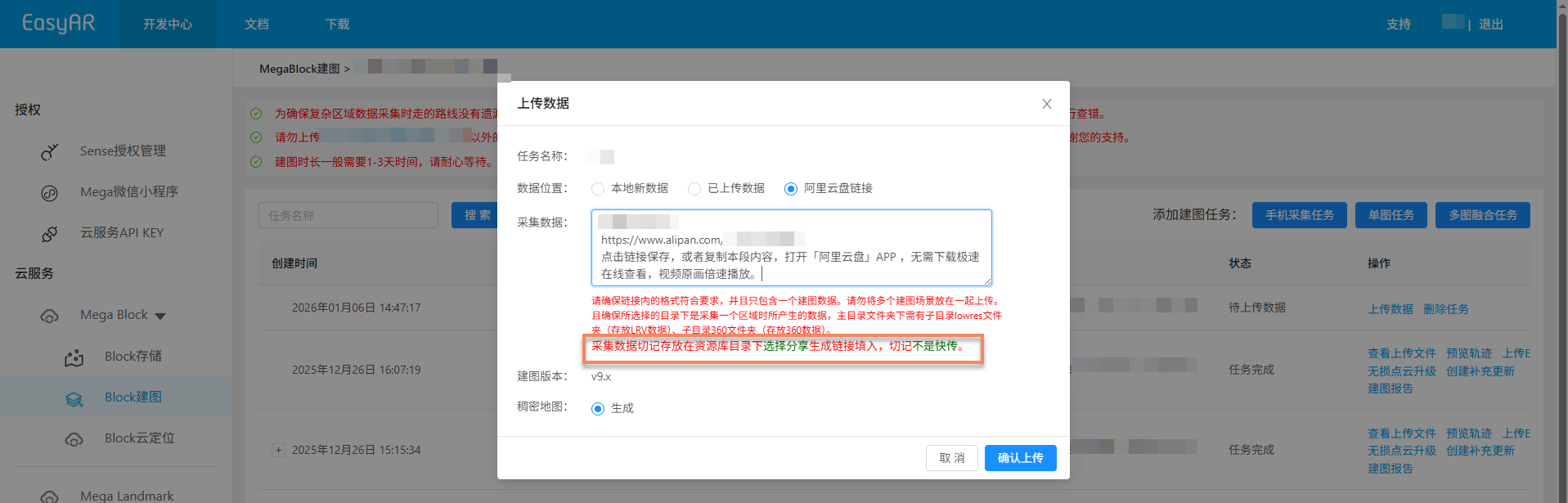
データ位置
データのソースや保存方法に応じて、以下のいずれかの方法でデータをアップロードできます:
- ローカルの新規データ
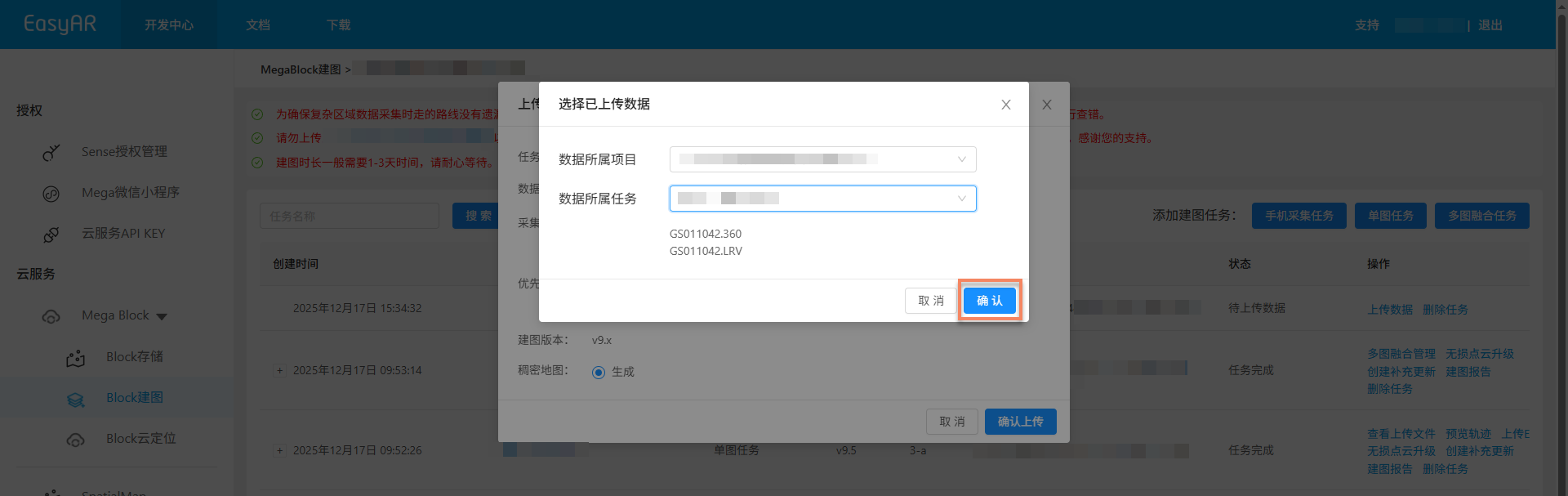
- アップロード済みデータのマッピング
- 阿里雲盤リンク
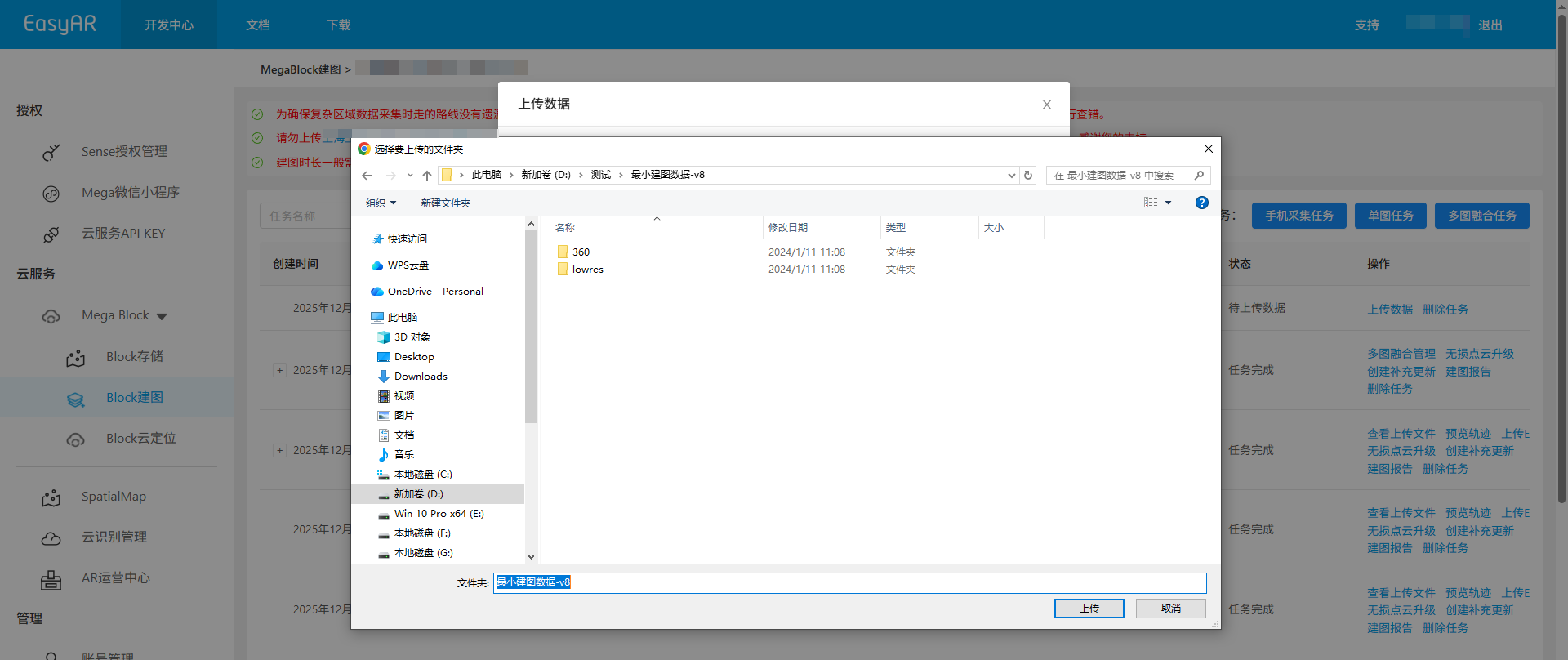
データ収集
選択をクリックし、データのメインディレクトリフォルダを選択します(詳細なマッピングデータファイル構造は下記参照)。アップロードをクリックします。
EIFデータ
- EIFデータはMegaにおけるリモートデバッグおよびシミュレーション位置調整専用のテストデータで、Mega効果のリモート検証や開発時のシミュレーション位置調整をサポートします。専用ツールでの収集が必要です。詳細な収集方法はEIFデータ収集ガイドを参照してください。
- アップロードデータポップアップではEIFデータは必須項目ではなく、後からEIFデータを追加アップロードできます。
- 注意:Mega Toolboxモバイルアプリで収集したEIFデータを選択する際は、EIFデータとマッピング動画データの対応関係に注意してください。例:収集データが美羅城1階の場合、一緒にアップロードするEIFデータも美羅城1階のものである必要があります。
アップロード地域
アップロード操作者の所在地に近い地域を選択します。
アップロード確認
アップロード確認ボタンをクリック後、リストにアップロード進捗とステータスが表示されます。- データアップロード中は、PCの電源を入れたままにし、ネットワーク接続を維持してください。ブラウザを閉じたり、ページをリロードしたり、他のメニューをクリックしたりしないでください。中断した場合は再操作が必要です。
Start mapping
アップロード完了後、タスクは自動的に審査中になります(下図参照)。
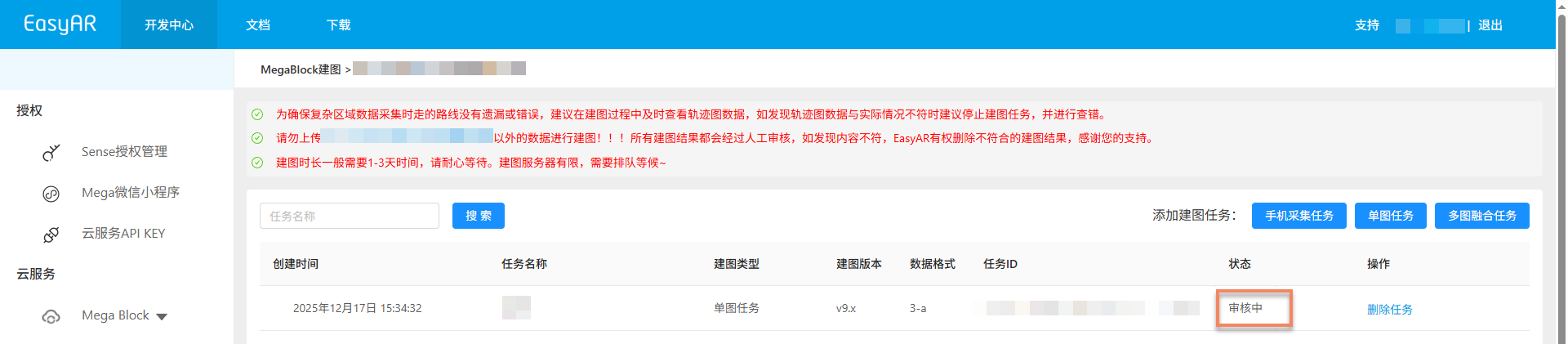
審査通過後、タスクは自動的にマッピングプロセスに入り、ステータスは待機中または生成中と表示されます(下図参照)。マッピング完了までお待ちください。

補助機能
以下の機能でマッピングタスクの管理と操作を効率化できます:
アップロードファイルの確認
アップロードされたマッピングファイルの完全性をチェックし、ファイル欠落によるマッピング失敗を防ぎます。
アップロードファイルの確認ボタンをクリックし、ポップアップで全アップロード済みファイルリストを確認します。
特定の
LRVファイルをクリックすると、動画内容をオンラインでプレビューでき、収集データの品質を確認できます。
事前トラック生成
マッピング結果生成前に事前トラック生成ボタンをクリックすると、事前トラック図を生成できます。プレビューで実際の収集トラックが計画経路と一致するかを判断します。経路計画図とトラック図の形状を比較し、収集経路が完全で未収集領域がないことを確認してください。不一致を検出した場合はマッピングを停止し、データを再収集または追加収集後に再アップロードします。

事前トラックのプレビュー
事前トラック生成後、事前トラックのプレビューボタンでトラック図を確認できます。マッピングが完了している場合はトラックのプレビューボタンで最終トラックを直接確認できます。

Upload EIF
EIFデータはMegaにおけるリモートデバッグおよびシミュレーション位置調整専用テストデータです。専用ツールでの収集が必要で、詳細はEIFデータ収集ガイドを参照してください。
EIFアップロード手順:
Upload EIFボタンをクリックします。
EIFデータディレクトリフォルダを選択し、
アップロード確認ボタンをクリックします。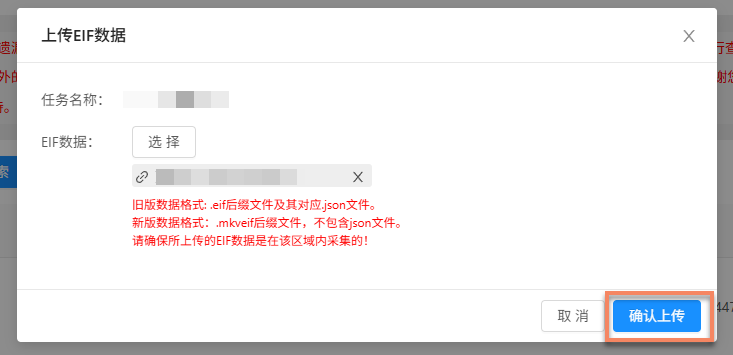
アップロードデータの確認:
アップロード完了後、アップロードファイルの確認ボタンでポップアップ内のEIFファイルを確認できます。ファイルのダウンロードと削除がサポートされています。

マッピング停止
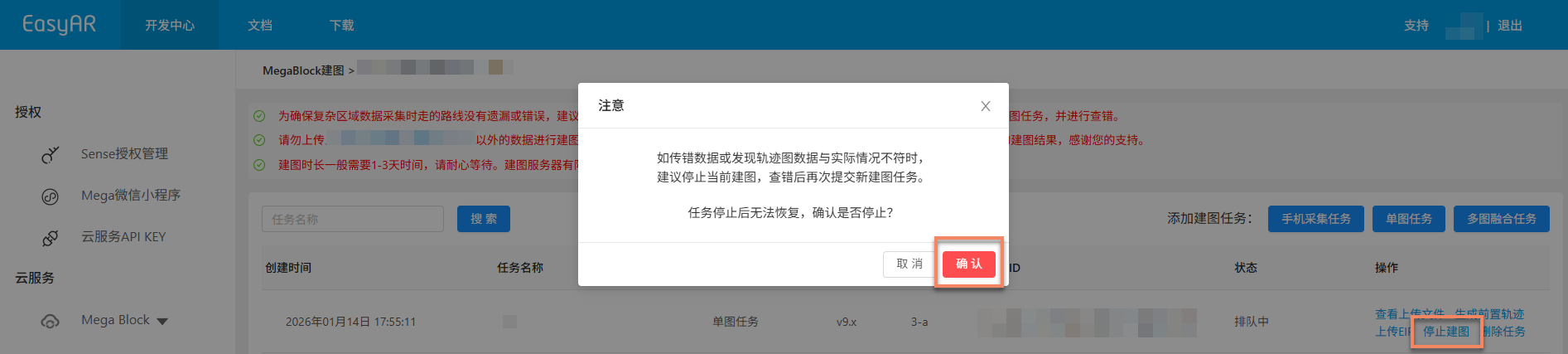
マッピングタスク完了前であれば、誤ったデータアップロードやトラック図データの不整合を検出した場合にマッピング停止ボタンをクリックし、確認ポップアップで確認を選択してマッピングを停止できます。
タスク削除
マッピングタスクが失敗した場合や不要になった場合は、タスク削除ボタンをクリックします。確認ポップアップで削除を選択すると削除が完了します。

マッピング結果の確認
タスクがマッピングプロセスに入ると、タスクステータスでマッピング完了を判断できます。ステータスがタスク完了または生成失敗の場合はマッピング終了を示します。

マッピング成功
ステータスがタスク完了の場合はマッピング成功を示し、結果が生成されています。以下の方法で結果を確認し、期待通りか評価できます。
マッピング結果の確認:
マッピング失敗
ステータスが生成失敗の場合はマッピング失敗を示します。以下の方法でトラブルシューティングを行ってください:
- マッピングレポートの確認:マッピングレポートの確認でエラー情報を基に解決策を探します。
- トラブルシューティングの参照:マッピング失敗ガイドで一般的な解決方法を確認します。
- 技術サポートへの連絡:上記で解決しない場合は、EasyARスタッフに連絡し、マッピングレポートの
JobIDを提供して問題を迅速に特定します。