Ar データフロー
この文書では、EasyAR Sense におけるデータフローについて説明します。EasyAR Sense ではコンポーネント化された API を使用し、コンポーネント間はデータフローで接続されます。
入力出力データ
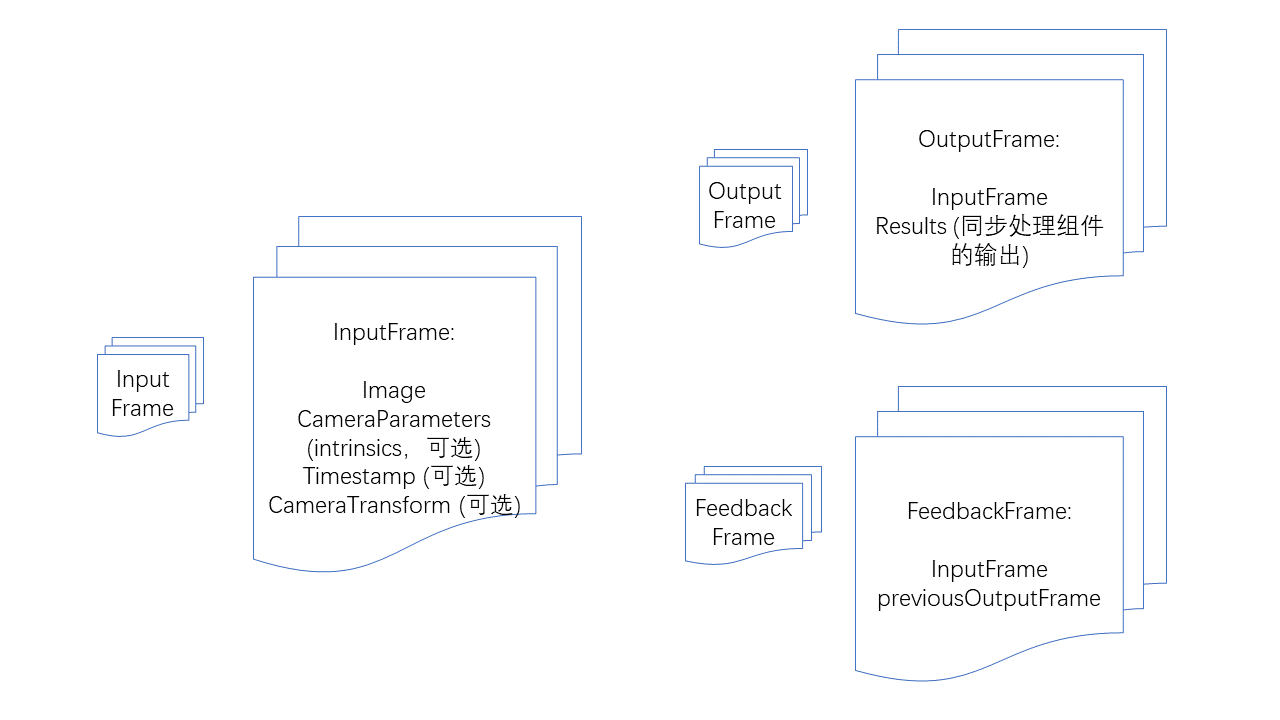
InputFrame:入力フレーム。画像、カメラパラメータ、タイムスタンプ、ワールド座標系に対するカメラの変換、トラッキング状態を含みます。カメラパラメータ、タイムスタンプ、変換、トラッキング状態はオプションですが、特定のアルゴリズムコンポーネントは入力に特定の要件を持ちます。
OutputFrame:出力フレーム。入力フレームと同期処理コンポーネントの出力結果を含みます。
FeedbackFrame:フィードバックフレーム。入力フレームと過去の出力フレームを含み、ImageTracker などのフィードバック式同期処理コンポーネントで使用されます。
カメラコンポーネント
CameraDevice:Windows、Mac、iOS、Android 上のデフォルトカメラ。
ARKitCameraDevice:iOS 上の ARKit デフォルト実装。
ARCoreCameraDevice:Android 上の ARCore デフォルト実装。
MotionTrackerCameraDevice:モーション追跡を実装し、マルチセンサーフュージョンによりデバイスの 6DoF 座標を計算します(Android のみサポート)。
ThreeDofCameraDevice:デフォルトカメラに 3DoF の方向を追加します。
InertialCameraDevice:デフォルトカメラに 3DoF の方向と慣性推定に基づく平面の並進を追加します。
custom camera device:カスタムカメラ実装。
アルゴリズムコンポーネント
フィードバック式同期処理コンポーネント:カメラ画像ごとに結果を出力する必要があり、相互干渉を避けるために前フレームの処理結果を必要とします。
ImageTracker:平面画像の検出とトラッキングを実現します。
ObjectTracker:3D物体の検出とトラッキングを実現します。
同期処理コンポーネント:カメラ画像のフレームごとに結果を出力する必要があります。
SurfaceTracker:環境表面のトラッキングを実現します。
SparseSpatialMap:スパース空間マップを実現し、物理空間をスキャンしながら点群マップを生成し、リアルタイム位置推定を行う機能を提供します。
MegaTracker:Mega空間位置推定を実現します。
非同期処理コンポーネント:カメラ画像のフレームごとに結果を出力する必要はありません。
CloudRecognizer:クラウド認識を実現します。
DenseSpatialMap:密空間マップを実現し、衝突やオクルージョンなどの効果の実装に使用できます。
コンポーネントの可用性チェック
すべてのコンポーネントには isAvailable 関数があり、コンポーネントが使用可能か判断するために使用できます。
コンポーネントが利用できない状況:
- 現在の OS で実装されていない
- コンポーネントに必要な依存関係(ARKit、ARCore など)が存在しない
- 現在のバージョン(variant)でコンポーネントが存在しない(例: 一部機能が存在しない軽量版)
- 現在のライセンスでコンポーネントが利用不可
コンポーネント使用前には必ず可用性を判断し、適切な代替手段(fallback)や通知を行ってください。
データフロー
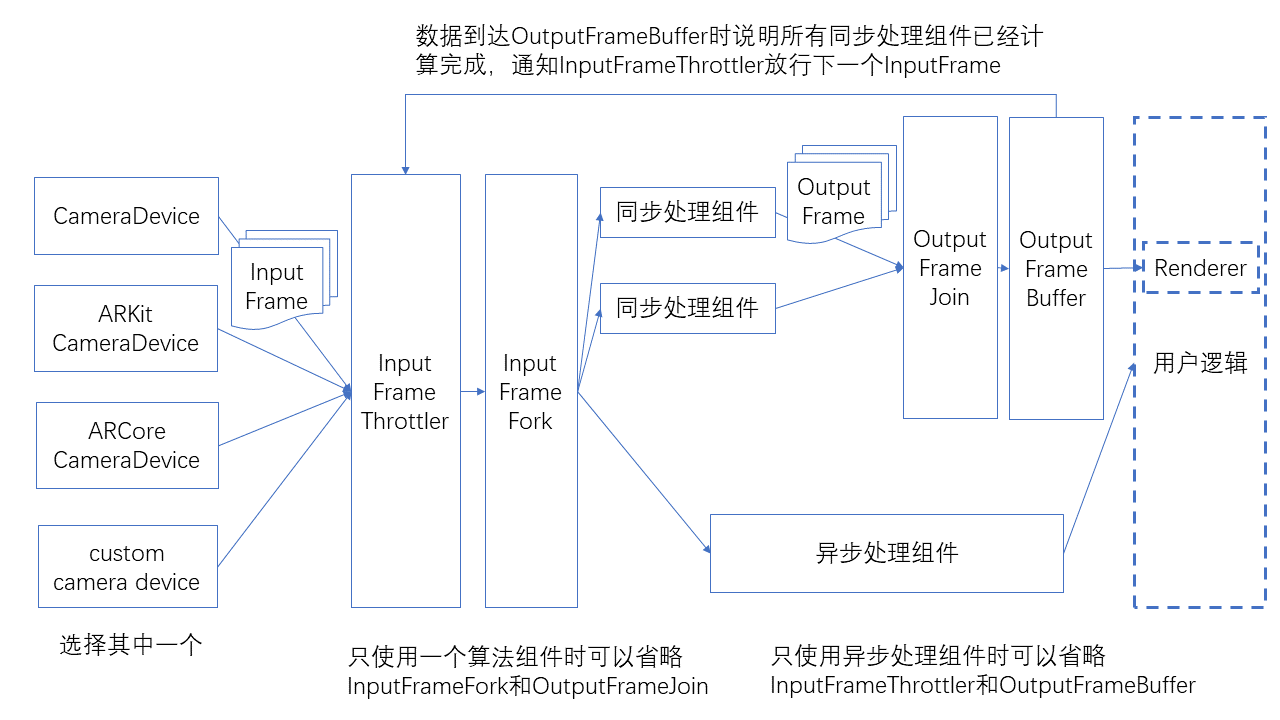
コンポーネントの接続方法を下図に示します。
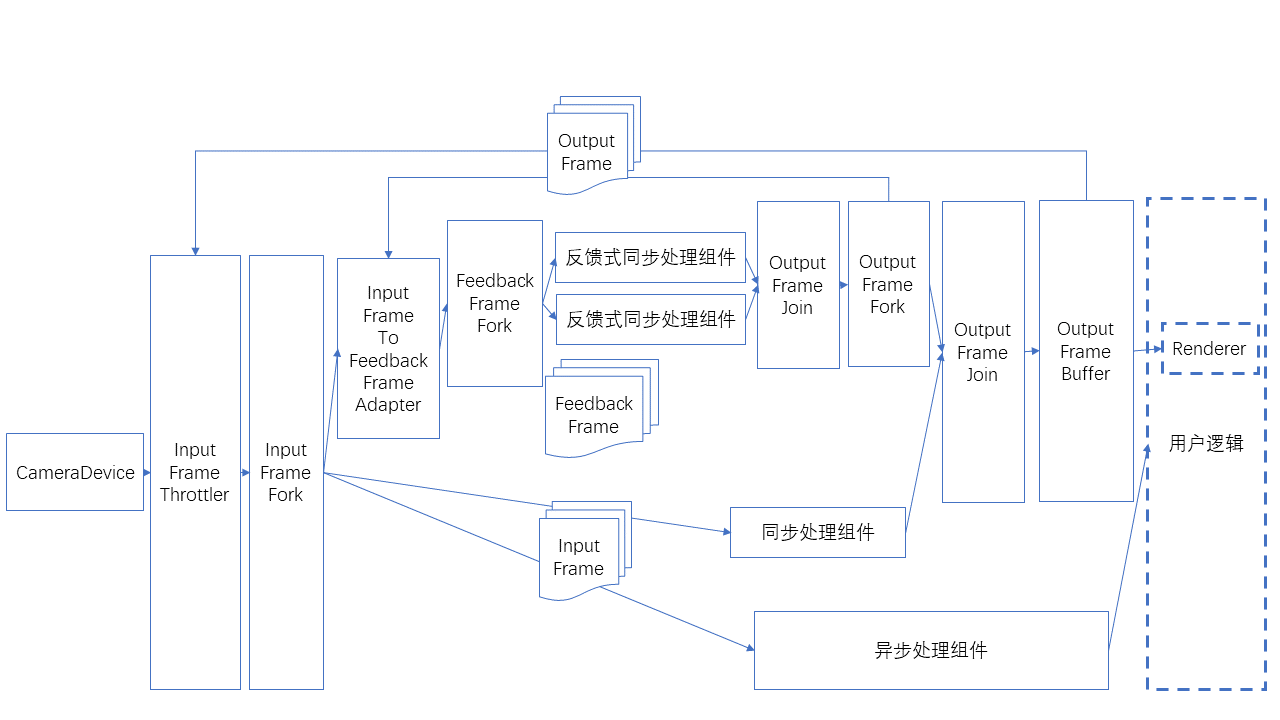
フィードバックフレームを入力とする特殊な使用法を下図に示します。
データフロー補助クラス
データフローの送信ポートと受信ポート。各コンポーネントはこれらのポートを含む必要があります。
SignalSink / SignalSource:信号(データなし)の受信/発信。
InputFrameSink / InputFrameSource:InputFrame の受信/発信。
OutputFrameSink / OutputFrameSource:OutputFrame の受信/発信。
FeedbackFrameSink / FeedbackFrameSource:FeedbackFrame の受信/発信。
データフローの分岐とマージ
InputFrameFork:1つの InputFrame を複数に分岐し、並列に発信。
OutputFrameFork:1つの OutputFrame を複数に分岐し、並列に発信。
OutputFrameJoin:複数の OutputFrame を1つにマージし、全ての結果を Results に結合。複数の入力接続は、データが流入している最中に行うべきではないことに注意(出力不能状態に陥る可能性あり)。(カメラ起動前にデータフロー接続を完了することを推奨。)
FeedbackFrameFork:1つの FeedbackFrame を複数に分岐し、並列に発信。
データフローのスロットリングとバッファリング
InputFrameThrottler:InputFrame を受信・発信するが、一度に1つだけ発信。トリガー信号を受信した後で次の InputFrame を発信。複数の InputFrame を受信した場合、後続のフレームが前のフレームを上書きする可能性がある。
OutputFrameBuffer:OutputFrame を受信してバッファリングし、ユーザーのポーリングを待機。OutputFrame を受信したときに信号を発信可能。
OutputFrameBuffer からの信号を InputFrameThrottler に接続することで、スロットリングプロセス全体を完了できる。
データフローの変換
InputFrameToOutputFrameAdapter:InputFrame を直接 OutputFrame にラップし、レンダリング表示に使用。
InputFrameToFeedbackFrameAdapter:1つの InputFrame と1つの FeedbackFrame を FeedbackFrame にラップし、フィードバック型同期処理コンポーネントに使用。
InputFrame 数の制限
CameraDevice は bufferCapacity を設定でき、これは発行する InputFrame の最大数を表します。現在のデフォルト値は 8 です。
カスタムカメラは BufferPool を使用して実装できます。
各コンポーネントが必要とする InputFrame の数は、各コンポーネントの API ドキュメントを参照してください。
InputFrame の数が不足すると、データフローが詰まり、レンダリングが停止する可能性があります。
InputFrame が不足すると、初回起動時はレンダリングが停止しなくても、バックグラウンドへの切り替えやコンポーネントの一時停止/再開後にレンダリングが停止する場合があるため、テスト時にはこのケースをカバーする必要があります。
接続と切断
データフロー実行中の接続と切断は推奨されません。
実行中に接続と切断を行う必要がある場合は、切断可能なのは「橋渡しエッジ」(このエッジを削除するとデータフローが2つに分離する)のみであり、「ループエッジ」(データフローを無向グラフと見なした場合のループを構成するエッジ)、OutputFrameJoin の入力、または InputFrameThrottler の sideInput 上では行わないでください。そうしないと、OutputFrameJoin や InputFrameThrottler などのノードでデータフローが詰まり出力できない状態になる可能性があります。
アルゴリズムコンポーネントには start/stop 機能があり、stop 時にはフレームは処理されませんが、結果なしでコンポーネントから出力されます。
典型的な使用法
以下は単一の ImageTracker の使用法で、非繰り返し平面認識画像の認識・追跡に使用できます。
![]()
以下は単一の ImageTracker の使用法で、繰り返し平面認識画像の認識・追跡に使用できます。
![]()
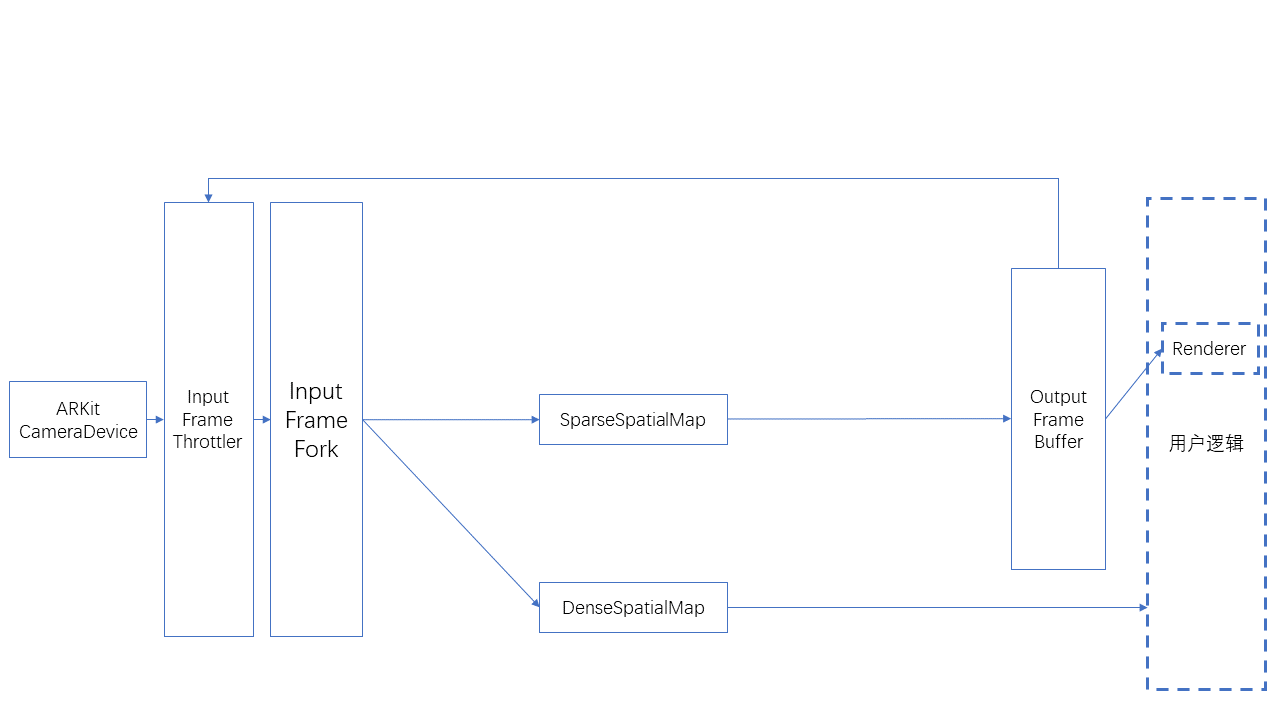
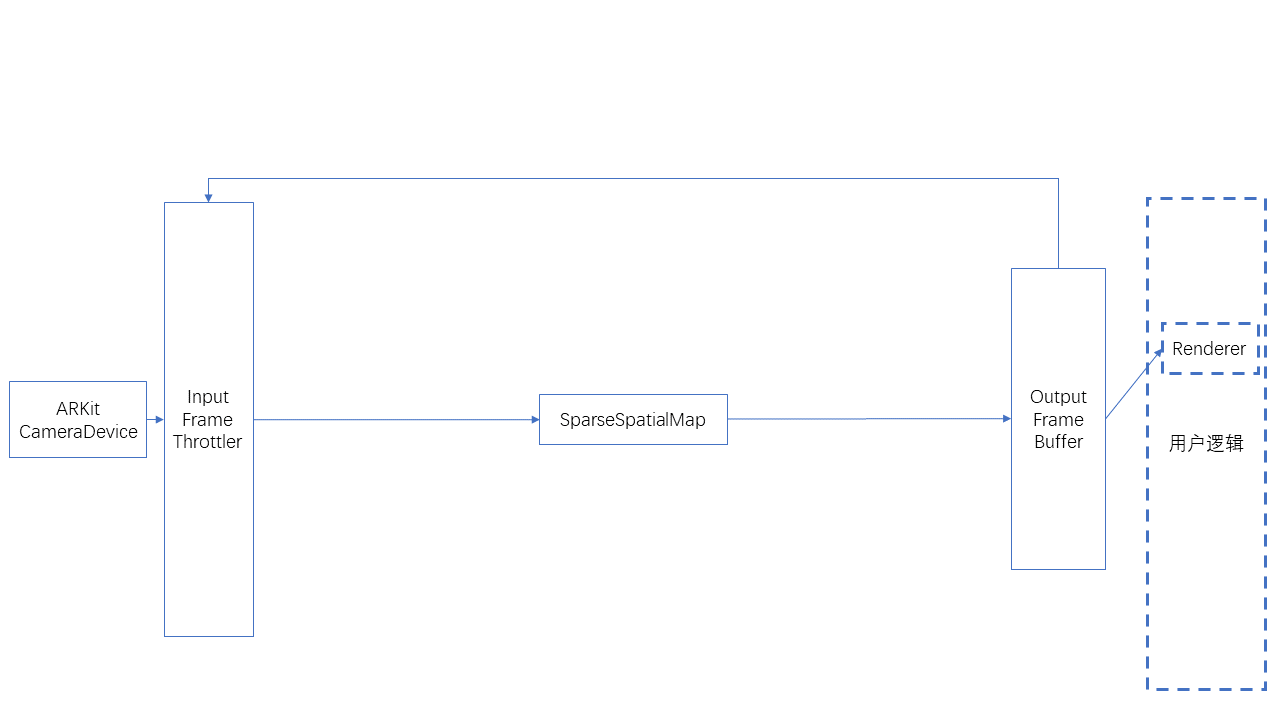
以下は SparseSpatialMap の使用法で、疎空間マップの構築・位置特定・追跡に使用できます。
以下は SparseSpatialMap と DenseSpatialMap の同時使用法で、疎空間マップの構築・位置特定・追跡と密空間マップの生成に使用できます。